mirror of
https://github.com/mavlink/mavlink-devguide.git
synced 2026-06-19 07:36:26 +00:00
New Crowdin updates (#711)
* New translations mission.md (Korean) [ci skip] * New translations mission.md (Chinese Simplified) [ci skip]
This commit is contained in:
+124
-115
@@ -1,52 +1,57 @@
|
||||
# 미션 프로토콜
|
||||
# Mission (Plan) Protocol
|
||||
|
||||
The mission sub-protocol allows a GCS or developer API to exchange _mission_ (flight plan), _geofence_ and _safe point_ information with a drone/component.
|
||||
The mission sub-protocol allows a GCS or developer API to exchange separate plans containing _mission_ (flight plan), _geofence_ and _safe point_ information with a drone/component.
|
||||
|
||||
The protocol covers:
|
||||
|
||||
- Operations to upload, download and clear missions, set/get the current mission item number, and get notification when the current mission item has changed.
|
||||
- Message type(s) and enumerations for exchanging mission items.
|
||||
- Mission Items ("MAVLink commands") that are common to most systems.
|
||||
- Operations to upload, download and clear a plan.
|
||||
- Message type(s) and enumerations for exchanging plan items.
|
||||
- Plan items ("MAV_CMD") that can be used in the various types of plans.
|
||||
- Messages to notify of current mission plan state
|
||||
- Commands to start missions, set the current mission item number, and so on.
|
||||
|
||||
The protocol supports re-request of messages that have not arrived, which allows missions to be reliably transferred over a lossy link.
|
||||
|
||||
## Mission Types {#mission_types}
|
||||
## Plan Types {#mission_types}
|
||||
|
||||
MAVLink 2 supports three types of "missions": flight plans, geofences and rally/safe points.
|
||||
The protocol uses the same sequence of operations for all types (albeit with different types of [Mission Items](#mavlink_commands)).
|
||||
The protocols supports the uploading and downloading of three types of plan: flight plans ("missions"), geofence plans, and rally/safe points plans.
|
||||
|
||||
The same sequence of operations is used for exchanging all types (albeit containing different allowed [MAV_CMD](#mavlink_commands) payloads).
|
||||
The mission types must be stored and handled separately/independently.
|
||||
|
||||
Mission protocol messages include the type of associated mission in the `mission_type` field (a MAVLink 2 message extension).
|
||||
Messages used by this protocol include the type of associated mission in the `mission_type` field (a MAVLink 2 message extension).
|
||||
The field takes one of the [MAV_MISSION_TYPE](../messages/common.md#MAV_MISSION_TYPE) enum values:
|
||||
[MAV_MISSION_TYPE_MISSION](../messages/common.md#MAV_MISSION_TYPE_MISSION), [MAV_MISSION_TYPE_FENCE](../messages/common.md#MAV_MISSION_TYPE_FENCE), [MAV_MISSION_TYPE_RALLY](../messages/common.md#MAV_MISSION_TYPE_RALLY).
|
||||
|
||||
:::info
|
||||
MAVLink 1 supports only "regular" flight-plan missions (this is implied/not explicitly set).
|
||||
MAVLink 1 supports only flight-plan missions (this is implied/not explicitly set).
|
||||
:::
|
||||
|
||||
## Mission Items (MAVLink Commands) {#mavlink_commands}
|
||||
## Plan Items (MAVLink Commands) {#mavlink_commands}
|
||||
|
||||
Mission items for all the [mission types](#mission_types) are defined in the [MAV_CMD](../messages/common.md#mav_commands) enum.
|
||||
Mission items (or more generically "Plan items") for all the [plan types](#mission_types) are defined in the [MAV_CMD](../messages/common.md#mav_commands) enum.
|
||||
|
||||
:::info
|
||||
[MAV_CMD](../messages/common.md#mav_commands) is used to define commands that can be used in missions ("mission items") and commands that can be sent outside of a mission context (using the [Command Protocol](../services/command.md)).
|
||||
[MAV_CMD](../messages/common.md#mav_commands) is used to define commands that can be used in plans ("mission items") and commands that can be sent outside of a mission context (using the [Command Protocol](../services/command.md)).
|
||||
Some `MAV_CMD` can be used with both mission and command protocols.
|
||||
Not all commands/mission items are supported on all systems (or for all flight modes).
|
||||
Not all commands/plan items are supported on all systems (or for all flight modes).
|
||||
:::
|
||||
|
||||
The items for the different types of mission are identified using a simple name prefix convention:
|
||||
The items for the different types of plan are usually identified using a simple name prefix convention:
|
||||
|
||||
- _Flight plans_:
|
||||
- NAV commands (`MAV_CMD_NAV_*`) for navigation/movement (e.g. [MAV_CMD_NAV_WAYPOINT](../messages/common.md#MAV_CMD_NAV_WAYPOINT), [MAV_CMD_NAV_LAND](../messages/common.md#MAV_CMD_NAV_LAND))
|
||||
- DO commands (`MAV_CMD_DO_*`) for immediate actions like changing speed or activating a servo (e.g. [MAV_CMD_DO_CHANGE_SPEED](../messages/common.md#MAV_CMD_DO_CHANGE_SPEED)).
|
||||
- CONDITION commands (`MAV_CMD_CONDITION_*`) for changing the execution of the mission based on a condition - e.g. pausing the mission for a time before executing next command ([MAV_CMD_CONDITION_DELAY](../messages/common.md#MAV_CMD_CONDITION_DELAY)).
|
||||
- _Geofence mission items_:
|
||||
- _Geofence plan_:
|
||||
- Prefixed with `MAV_CMD_NAV_FENCE_` (e.g. [MAV_CMD_NAV_FENCE_RETURN_POINT](../messages/common.md#MAV_CMD_NAV_FENCE_RETURN_POINT)).
|
||||
- _Rally point mission items_:
|
||||
- There is just one rally point `MAV_CMD`: [MAV_CMD_NAV_RALLY_POINT](../messages/common.md#MAV_CMD_NAV_RALLY_POINT).
|
||||
- _Rally point plan_:
|
||||
- Rally points are defined using [MAV_CMD_NAV_RALLY_POINT](../messages/common.md#MAV_CMD_NAV_RALLY_POINT).
|
||||
|
||||
Mission items (`MAV_CMD`) are transmitted/encoded in [MISSION_ITEM_INT](#MISSION_ITEM_INT) messages.
|
||||
This message includes fields to identify the particular mission item (command id) and up to 7 command-specific optional parameters.
|
||||
## Plan Payload Message
|
||||
|
||||
Plan items (`MAV_CMD`) are transmitted/encoded in [MISSION_ITEM_INT](#MISSION_ITEM_INT) messages.
|
||||
This message includes fields to identify the particular plan item (command id) and up to 7 command-specific optional parameters.
|
||||
|
||||
| Field Name | Type | Values | Description |
|
||||
| ----------------------------- | ----------------------------- | ------------------------------------------------------------------ | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
@@ -62,7 +67,7 @@ This message includes fields to identify the particular mission item (command id
|
||||
The first four parameters (shown above) can be used for any purpose - this depends on the particular [command](../messages/common.md#mav_commands).
|
||||
The last three parameters (x, y, z) are used for positional information in `MAV_CMD_NAV_*` commands, but can be used for any purpose in other commands.
|
||||
|
||||
The remaining message fields are used for addressing, defining the mission type, specifying the reference frame used for x, y, z in `MAV_CMD_NAV_*` messages, etc.:
|
||||
The remaining message fields are used for addressing, defining the plan type, specifying the reference frame used for x, y, z in `MAV_CMD_NAV_*` messages, etc.:
|
||||
|
||||
| Field Name | Type | Values | Description |
|
||||
| ------------------------------------- | ----------------------------- | ------------------------------------------------------------------------------- | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
@@ -80,15 +85,15 @@ The following messages and enums are used by the service.
|
||||
|
||||
| Message | Description |
|
||||
| --------------------------------------------------------------------------------------------------------------------------------------------- | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| <a id="MISSION_REQUEST_LIST"></a>[MISSION_REQUEST_LIST](../messages/common.md#MISSION_REQUEST_LIST) | Initiate [mission download](#download_mission) from a system by requesting the list of mission items. |
|
||||
| <a id="MISSION_REQUEST_LIST"></a>[MISSION_REQUEST_LIST](../messages/common.md#MISSION_REQUEST_LIST) | Initiate [mission download](#download_mission) from a system by requesting the list of plan items. |
|
||||
| <a id="MISSION_COUNT"></a>[MISSION_COUNT](../messages/common.md#MISSION_COUNT) | Send the number of items in a mission. This is used to initiate [mission upload](#uploading_mission) or as a response to [MISSION_REQUEST_LIST](#MISSION_REQUEST_LIST) when [downloading a mission](#download_mission). |
|
||||
| <a id="MISSION_REQUEST_INT"></a>[MISSION_REQUEST_INT](../messages/common.md#MISSION_REQUEST_INT) | Request mission item data for a specific sequence number be sent by the recipient using a [MISSION_ITEM_INT](#MISSION_ITEM_INT) message. Used for mission [upload](#uploading_mission) and [download](#download_mission). |
|
||||
| <a id="MISSION_ITEM_INT"></a>[MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) | Message encoding a [mission item/command](#mavlink_commands) (defined in a [MAV_CMD](#MAV_CMD)). Used for mission [upload](#uploading_mission) and [download](#download_mission). |
|
||||
| <a id="MISSION_REQUEST_INT"></a>[MISSION_REQUEST_INT](../messages/common.md#MISSION_REQUEST_INT) | Request plan item data for a specific sequence number be sent by the recipient using a [MISSION_ITEM_INT](#MISSION_ITEM_INT) message. Used for plan [upload](#uploading_mission) and [download](#download_mission). |
|
||||
| <a id="MISSION_ITEM_INT"></a>[MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) | Message encoding a [plan item/command](#mavlink_commands) (defined in a [MAV_CMD](#MAV_CMD)). Used for plan [upload](#uploading_mission) and [download](#download_mission). |
|
||||
| <a id="MISSION_ACK"></a>[MISSION_ACK](../messages/common.md#MISSION_ACK) | Acknowledgment message when a system completes a [mission operation](#operations) (e.g. sent by autopilot after it has uploaded all mission items). The message includes a [MAV_MISSION_RESULT](#MAV_MISSION_RESULT) indicating either success or the type of failure. |
|
||||
| <a id="MISSION_CURRENT"></a>[MISSION_CURRENT](../messages/common.md#MISSION_CURRENT) | Message containing the current mission item sequence number. This is streamed and also emitted when the [current mission item is set/changed](#current_mission_item). |
|
||||
| <a id="MISSION_SET_CURRENT"></a>[MISSION_SET_CURRENT](../messages/common.md#MISSION_SET_CURRENT) | [Set the current mission item](#current_mission_item) by sequence number (continue to this item on the shortest path). |
|
||||
| <a id="STATUSTEXT"></a>[STATUSTEXT](../messages/common.md#STATUSTEXT) | Sent to notify systems when a request to [set the current mission item](#current_mission_item) fails. |
|
||||
| <a id="MISSION_CLEAR_ALL"></a>[MISSION_CLEAR_ALL](../messages/common.md#MISSION_CLEAR_ALL) | Message sent to [clear/delete all mission items](#clear_mission) stored on a system. |
|
||||
| <a id="MISSION_CLEAR_ALL"></a>[MISSION_CLEAR_ALL](../messages/common.md#MISSION_CLEAR_ALL) | Message sent to [clear/delete all plan items of a particular type](#clear_mission) stored on a system. |
|
||||
| <a id="MISSION_ITEM_REACHED"></a>[MISSION_ITEM_REACHED](../messages/common.md#MISSION_ITEM_REACHED) | Message emitted by system whenever it reaches a new waypoint. Used to [monitor progress](#monitor_progress). |
|
||||
|
||||
| Command | Description |
|
||||
@@ -100,7 +105,7 @@ The following messages and enums are used by the service.
|
||||
| <a id="MAV_MISSION_TYPE"></a>[MAV_MISSION_TYPE](../messages/common.md#MAV_MISSION_TYPE) | [Mission type](#mission_types) for message (mission, geofence, rallypoints). |
|
||||
| <a id="MAV_MISSION_RESULT"></a>[MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT) | Used to indicate the success or failure reason for an operation (e.g. to upload or download a mission). This is carried in a [MISSION_ACK](#MISSION_ACK). |
|
||||
| <a id="MAV_FRAME"></a>[MAV_FRAME](../messages/common.md#MAV_FRAME) | Co-ordinate frame for position/velocity/acceleration data in the message. |
|
||||
| <a id="MAV_CMD"></a>[MAV_CMD](../messages/common.md#mav_commands) | [Mission Items](#mavlink_commands) (and MAVLink commands) sent in [MISSION_ITEM_INT](#MISSION_ITEM_INT). |
|
||||
| <a id="MAV_CMD"></a>[MAV_CMD](../messages/common.md#mav_commands) | [Plan Items](#mavlink_commands) (and MAVLink commands) sent in [MISSION_ITEM_INT](#MISSION_ITEM_INT). |
|
||||
|
||||
## Deprecated Types: MISSION_ITEM {#command_message_type}
|
||||
|
||||
@@ -123,7 +128,7 @@ The table below shows that the positional parameters can be local (x, y, z), glo
|
||||
The co-ordinate frame of positional parameters is defined in the `MISSION_ITEM_INT.frame` field using a [MAV_FRAME](#MAV_FRAME) value.
|
||||
|
||||
The global frames are prefixed with `MAV_FRAME_GLOBAL_*`.
|
||||
Mission items should use frame variants that have the suffix `_INT`: e.g. `MAV_FRAME_GLOBAL_RELATIVE_ALT_INT`, `MAV_FRAME_GLOBAL_INT`, `MAV_FRAME_GLOBAL_TERRAIN_ALT_INT`.
|
||||
Plan items should use frame variants that have the suffix `_INT`: e.g. `MAV_FRAME_GLOBAL_RELATIVE_ALT_INT`, `MAV_FRAME_GLOBAL_INT`, `MAV_FRAME_GLOBAL_TERRAIN_ALT_INT`.
|
||||
When using these frames, latitude and longitude values must be encoded by multiplying the degrees by 1E7 (e.g. the latitude 69.69000000 would be sent as 69.69000000x1E7 = 696900000).
|
||||
Using int32 of degrees \* 10^7 has higher resolution than could be achieved with single floating point.
|
||||
|
||||
@@ -154,16 +159,17 @@ Don't use [MAV_FRAME_MISSION](../messages/common.md#MAV_FRAME_MISSION) for missi
|
||||
`Param5`, `param6`, `param7` may also be used for non-positional information.
|
||||
In this case the [MISSION_ITEM_INT.frame](#MISSION_ITEM_INT) should be set to [MAV_FRAME_MISSION](../messages/common.md#MAV_FRAME_MISSION) (this is equivalent to say "the frame data is irrelevant").
|
||||
|
||||
As param5 and param6 are sent in _integer_ fields, generally you should design mission items/MAV_CMDs such that these only include integer data (and are sent as-is/unscaled).
|
||||
If these must be used for real numbers and scaling is required, then this must be noted in the mission item itself.
|
||||
As `param5` and `param6` are sent in _integer_ fields, generally you should design mission items/MAV_CMDs such that these only include integer data (and are sent as-is/unscaled).
|
||||
If these must be used for real numbers and scaling is required, then this must be noted in the plan item itself.
|
||||
|
||||
## Operations {#operations}
|
||||
|
||||
This section defines all the protocol operations.
|
||||
This section defines the operations for detecting changes to the plan, upload and download, and clearing the plan.
|
||||
It is common to all plan types.
|
||||
|
||||
### Detecting Mission/Plan Changes
|
||||
### Detecting Plan Changes
|
||||
|
||||
Mission upload and download can be expensive operations, in particular for large missions.
|
||||
Plan upload and download can be expensive operations, in particular for large missions.
|
||||
A GCS can avoid unnecessary uploads and downloads by first checking whether it has a matching id(s) for the corresponding plan on the vehicle.
|
||||
|
||||
The current id for different parts of the plan are streamed in [MISSION_CURRENT](#MISSION_CURRENT) message, using the appropriately named fields: `mission_id`, `fence_id`, `rally_points_id`.
|
||||
@@ -177,9 +183,9 @@ On upload, the generated ID is sent to the GCS in the final part of the upload s
|
||||
On download, the stored ID is sent to the GCS in the [MISSION_COUNT.opaque_id](#MISSION_COUNT) field.
|
||||
|
||||
The GCS should store the value of the ID from the flight stack as the "current id" for whatever part of the plan was uploaded/downloaded.
|
||||
It can then monitor `MISSION_CURRENT`, and check its cached values against the current plan ids to determine whether it has a matching mission, or needs to download the mission from the vehicle.
|
||||
It can then monitor `MISSION_CURRENT`, and check its cached values against the current plan ids to determine whether it has a matching plan, or needs to download the plan from the vehicle.
|
||||
|
||||
### Upload a Mission to the Vehicle {#uploading_mission}
|
||||
### Upload a Plan to the Vehicle {#uploading_mission}
|
||||
|
||||
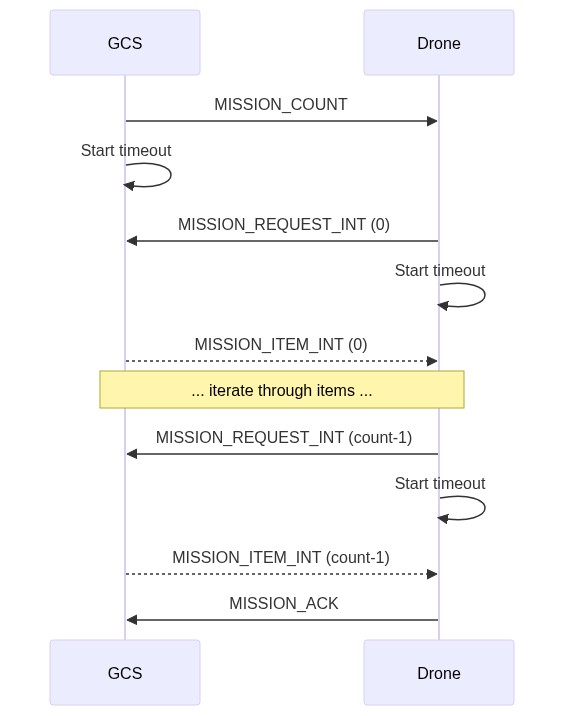
The diagram below shows the communication sequence to upload a mission to a drone (assuming all operations succeed).
|
||||
|
||||
@@ -193,7 +199,7 @@ Mission upload/download can be bandwidth intensive and time consuming.
|
||||
[Check for plan changes](#detecting-missionplan-changes) before uploading (or downloading) a mission.
|
||||
:::
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fQ09VTlRcbiAgICBHQ1MtPj5HQ1M6IFN0YXJ0IHRpbWVvdXRcbiAgICBEcm9uZS0-PkdDUzogTUlTU0lPTl9SRVFVRVNUX0lOVCAoMClcbiAgICBEcm9uZS0-PkRyb25lOiBTdGFydCB0aW1lb3V0XG4gICAgR0NTLS0-PkRyb25lOiBNSVNTSU9OX0lURU1fSU5UICgwKVxuICAgIE5vdGUgb3ZlciBHQ1MsRHJvbmU6IC4uLiBpdGVyYXRlIHRocm91Z2ggaXRlbXMgLi4uXG4gICAgRHJvbmUtPj5HQ1M6IE1JU1NJT05fUkVRVUVTVF9JTlQgKGNvdW50LTEpXG4gICAgRHJvbmUtPj5Ecm9uZTogU3RhcnQgdGltZW91dFxuICAgIEdDUy0tPj5Ecm9uZTogTUlTU0lPTl9JVEVNX0lOVCAoY291bnQtMSlcbiAgICBEcm9uZS0-PkdDUzogTUlTU0lPTl9BQ0siLCJtZXJtYWlkIjp7InRoZW1lIjoiZGVmYXVsdCJ9LCJ1cGRhdGVFZGl0b3IiOmZhbHNlfQ)
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fQ09VTlRcbiAgICBHQ1MtPj5HQ1M6IFN0YXJ0IHRpbWVvdXRcbiAgICBEcm9uZS0-PkdDUzogTUlTU0lPTl9SRVFVRVNUX0lOVCAoMClcbiAgICBEcm9uZS0-PkRyb25lOiBTdGFydCB0aW1lb3V0XG4gICAgR0NTLS0-PkRyb25lOiBNSVNTSU9OX0lURU1fSU5UICgwKVxuICAgIE5vdGUgb3ZlciBHQ1MsRHJvbmU6IC4uLiBpdGVyYXRlIHRocm91Z2ggaXRlbXMgLi4uXG4gICAgRHJvbmUtPj5HQ1M6IE1JU1NJT05fUkVRVUVTVF9JTlQgKGNvdW50LTEpXG4gICAgRHJvbmUtPj5Ecm9uZTogU3RhcnQgdGltZW91dFxuICAgIEdDUy0tPj5Ecm9uZTogTUlTU0lPTl9JVEVNX0lOVCAoY291bnQtMSlcbiAgICBEcm9uZS0-PkdDUzogTUlTU0lPTl9BQ0siLCJtZXJtYWlkIjp7InRoZW1lIjoiZGVmYXVsdCJ9LCJ1cGRhdGVFZGl0b3IiOmZhbHNlfQ)
|
||||
|
||||
<!-- Original sequence diagram
|
||||
sequenceDiagram;
|
||||
@@ -213,13 +219,13 @@ sequenceDiagram;
|
||||
|
||||
In more detail, the sequence of operations is:
|
||||
|
||||
1. GCS sends [MISSION_COUNT](../messages/common.md#MISSION_COUNT) including the number of mission items to be uploaded (`count`).
|
||||
1. GCS sends [MISSION_COUNT](../messages/common.md#MISSION_COUNT) including the number of plan items (`MISSION_ITEM_INT`) to be uploaded (`count`).
|
||||
- A [timeout](#timeout) must be started for the GCS to wait on the response from Drone (`MISSION_REQUEST_INT`).
|
||||
2. Drone receives message and responds with [MISSION_REQUEST_INT](../messages/common.md#MISSION_REQUEST_INT) requesting the first mission item (`seq==0`).
|
||||
2. Drone receives message and responds with [MISSION_REQUEST_INT](../messages/common.md#MISSION_REQUEST_INT) requesting the first plan item (`seq==0`).
|
||||
- A [timeout](#timeout) must be started for the Drone to wait on the `MISSION_ITEM_INT` response from GCS.
|
||||
3. GCS receives `MISSION_REQUEST_INT` and responds with the requested mission item in a [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) message.
|
||||
3. GCS receives `MISSION_REQUEST_INT` and responds with the requested item in a [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) message.
|
||||
4. Drone and GCS repeat the `MISSION_REQUEST_INT`/`MISSION_ITEM_INT` cycle, iterating `seq` until all items are uploaded (`seq==count-1`).
|
||||
5. After receiving the last mission item the drone responds with [MISSION_ACK](../messages/common.md#MISSION_ACK) with the `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED) indicating mission upload completion/success.
|
||||
5. After receiving the last plan item the drone responds with [MISSION_ACK](../messages/common.md#MISSION_ACK) with the `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED) indicating mission upload completion/success.
|
||||
- The drone should set the new mission to be the current mission, discarding the original data.
|
||||
- The drone considers the upload complete.
|
||||
6. GCS receives `MISSION_ACK` containing `MAV_MISSION_ACCEPTED` to indicate the operation is complete.
|
||||
@@ -229,25 +235,25 @@ Notes:
|
||||
|
||||
- A [timeout](#timeout) is set for every message that requires a response (e.g. `MISSION_REQUEST_INT`).
|
||||
If the timeout expires without a response being received then the request must be resent.
|
||||
- Mission items must be received in order.
|
||||
- Plan items must be received in order.
|
||||
If an item is received out-of-sequence the expected item should be re-requested by the vehicle (the out-of-sequence item is dropped).
|
||||
- An [error](#errors) can be signaled in response to any request using a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing an error code.
|
||||
This must cancel the operation and restore the mission to its previous state.
|
||||
For example, the drone might respond to the [MISSION_COUNT](../messages/common.md#MISSION_COUNT) request with a [MAV_MISSION_NO_SPACE](../messages/common.md#MAV_MISSION_NO_SPACE) if there isn't enough space to upload the mission.
|
||||
- The sequence above shows the [mission items](#mavlink_commands) packaged in [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) messages.
|
||||
- The sequence above shows the [plan items](#mavlink_commands) packaged in [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) messages.
|
||||
Protocol implementations must also support [MISSION_ITEM](../messages/common.md#MISSION_ITEM) and [MISSION_REQUEST](../messages/common.md#MISSION_REQUEST) in the same way.
|
||||
- Uploading an empty mission ([MISSION_COUNT](../messages/common.md#MISSION_COUNT) is 0) has the same effect as [clearing the mission](#clear_mission).
|
||||
|
||||
### Download a Mission from the Vehicle {#download_mission}
|
||||
### Download a Plan from the Vehicle {#download_mission}
|
||||
|
||||
:::info
|
||||
Mission upload/download can also be bandwidth intensive and time consuming.
|
||||
Plan upload/download can be bandwidth intensive and time consuming.
|
||||
[Check for plan changes](#detecting-missionplan-changes) before downloading (or uploading) a mission.
|
||||
:::
|
||||
|
||||
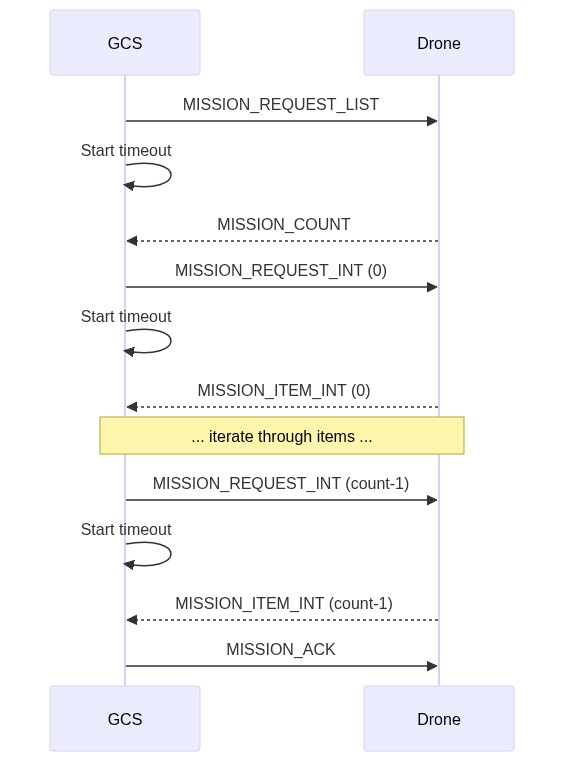
The diagram below shows the communication sequence to download a mission from a drone (assuming all operations succeed).
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9MSVNUXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0NPVU5UXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9JTlQgKDApXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0lURU1fSU5UICgwKVxuICAgIE5vdGUgb3ZlciBHQ1MsRHJvbmU6IC4uLiBpdGVyYXRlIHRocm91Z2ggaXRlbXMgLi4uXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9JTlQgKGNvdW50LTEpXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0lURU1fSU5UIChjb3VudC0xKVxuICAgIEdDUy0-PkRyb25lOiBNSVNTSU9OX0FDSyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9MSVNUXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0NPVU5UXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9JTlQgKDApXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0lURU1fSU5UICgwKVxuICAgIE5vdGUgb3ZlciBHQ1MsRHJvbmU6IC4uLiBpdGVyYXRlIHRocm91Z2ggaXRlbXMgLi4uXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9JTlQgKGNvdW50LTEpXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0lURU1fSU5UIChjb3VudC0xKVxuICAgIEdDUy0-PkRyb25lOiBNSVNTSU9OX0FDSyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
<!-- original sequence
|
||||
sequenceDiagram;
|
||||
@@ -266,9 +272,9 @@ sequenceDiagram;
|
||||
GCS->>Drone: MISSION_ACK
|
||||
-->
|
||||
|
||||
The sequence is similar to that for [uploading a mission](#uploading_mission).
|
||||
The sequence is similar to that for [uploading a plan](#uploading_mission).
|
||||
The main difference is that the client (e.g. GCS) sends [MISSION_REQUEST_LIST](../messages/common.md#MISSION_REQUEST_LIST), which triggers the autopilot to respond with the current count of items ([MISSION_COUNT](#MISSION_COUNT)).
|
||||
This starts a cycle where the GCS requests mission items, and the drone supplies them.
|
||||
This starts a cycle where the GCS requests plan items, and the drone supplies them.
|
||||
|
||||
Note:
|
||||
|
||||
@@ -283,9 +289,81 @@ Note:
|
||||
- The sequence above shows the [mission items](#mavlink_commands) packaged in [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) messages.
|
||||
Protocol implementations must also support [MISSION_ITEM](../messages/common.md#MISSION_ITEM) and [MISSION_REQUEST](../messages/common.md#MISSION_REQUEST) in the same way.
|
||||
|
||||
### Clear Plan {#clear_mission}
|
||||
|
||||
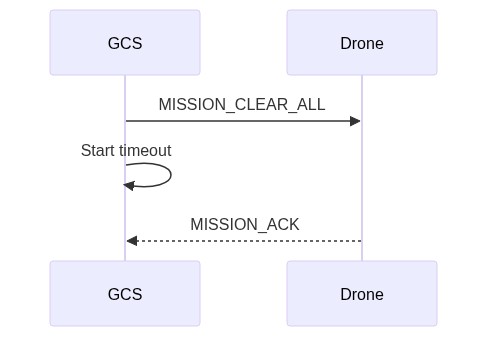
The diagram below shows the communication sequence to clear a plan from a drone (assuming all operations succeed).
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fQ0xFQVJfQUxMXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0FDSyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
<!--
|
||||
sequenceDiagram;
|
||||
participant GCS
|
||||
participant Drone
|
||||
GCS->>Drone: MISSION_CLEAR_ALL
|
||||
GCS->>GCS: Start timeout
|
||||
Drone-- >>GCS: MISSION_ACK
|
||||
-->
|
||||
|
||||
In more detail, the sequence of operations is:
|
||||
|
||||
1. GCS/API sends [MISSION_CLEAR_ALL](../messages/common.md#MISSION_CLEAR_ALL)
|
||||
- A [timeout](#timeout) is started for the GCS to wait on `MISSION_ACK` from Drone.
|
||||
2. Drone receives the message, and clears the specified plan type from storage.
|
||||
3. Drone responds with [MISSION_ACK](../messages/common.md#MISSION_ACK) with result `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED) indicating success.
|
||||
4. GCS receives `MISSION_ACK` and clears its own stored information about the mission.
|
||||
The operation is now complete.
|
||||
|
||||
Note:
|
||||
|
||||
- A [timeout](#timeout) is set for every message that requires a response (e.g. `MISSION_CLEAR_ALL`).
|
||||
If the timeout expires without a response being received then the request must be resent.
|
||||
- An [error](#errors) can be signaled in response to any request (in this case, just `MISSION_CLEAR_ALL`) using a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing an error code.
|
||||
This must cancel the operation.
|
||||
The GCS record of the mission (if any) should be retained.
|
||||
|
||||
### Canceling Operations {#cancel}
|
||||
|
||||
The above mission operations may be canceled by responding to any request (e.g. `MISSION_REQUEST_INT`) with a `MISSION_ACK` message containing the `MAV_MISSION_OPERATION_CANCELLED` error.
|
||||
|
||||
Both systems should then return themselves to the idle state (if the system does not receive the cancellation message it will resend the request; the recipient will then be in the idle state and may respond with an appropriate error for that state).
|
||||
|
||||
### Operation Exceptions
|
||||
|
||||
#### Timeouts and Retries {#timeout}
|
||||
|
||||
A timeout should be set for all messages that require a response.
|
||||
If the expected response is not received before the timeout then the message must be resent.
|
||||
If no response is received after a number of retries then the client must cancel the operation and return to an idle state.
|
||||
|
||||
The recommended timeout values before resending, and the number of retries are:
|
||||
|
||||
- Timeout (default): 1500 ms
|
||||
- Timeout (plan items): 250 ms.
|
||||
- Retries (max): 5
|
||||
|
||||
#### Errors/Completion {#errors}
|
||||
|
||||
All operations complete with a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing the result of the operation ([MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT)) in the `type` field.
|
||||
|
||||
On successful completion, the message must contain `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED); this is sent by the system that is receiving the command/data (e.g. the drone for mission upload or the GCS for mission download).
|
||||
|
||||
An operation may also complete with an error - `MISSION_ACK.type` set to [MAV_MISSION_ERROR](../messages/common.md#MAV_MISSION_ERROR) or some other error code in [MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT).
|
||||
This can occur in response to any message/anywhere in the sequence.
|
||||
|
||||
Errors are considered unrecoverable.
|
||||
If an error is sent, both ends of the system should reset themselves to the idle state and the current state of the mission on the vehicle should be unaltered.
|
||||
|
||||
Note:
|
||||
|
||||
- [timeouts](#timeout) are not considered errors.
|
||||
- Out-of-sequence messages in mission upload/download are recoverable, and are not treated as errors.
|
||||
|
||||
## Mission Management Operations {#mission_management}
|
||||
|
||||
### Set Current Mission Item {#current_mission_item}
|
||||
|
||||
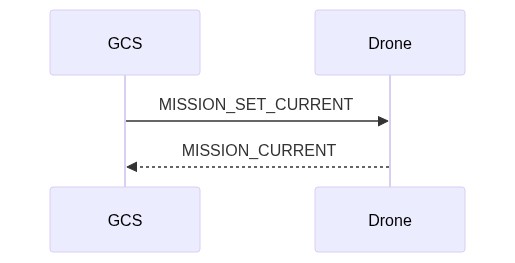
The diagram below shows the communication sequence to set the current mission item.
|
||||
Note that here we mean "mission" not plan, since rally points and geofences are not executed sequentially.
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fU0VUX0NVUlJFTlRcbiAgICBEcm9uZS0tPj5HQ1M6IE1JU1NJT05fQ1VSUkVOVCIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
@@ -320,75 +398,6 @@ GCS/developer API can monitor progress by handling the appropriate messages sent
|
||||
The message contains the `seq` number of the current mission item.
|
||||
- The vehicle must also broadcast a [MISSION_CURRENT](../messages/common.md#MISSION_CURRENT) message if the [current mission item](#current_mission_item) is changed.
|
||||
|
||||
### Clear Missions {#clear_mission}
|
||||
|
||||
The diagram below shows the communication sequence to clear the mission from a drone (assuming all operations succeed).
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fQ0xFQVJfQUxMXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0FDSyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
<!--
|
||||
sequenceDiagram;
|
||||
participant GCS
|
||||
participant Drone
|
||||
GCS->>Drone: MISSION_CLEAR_ALL
|
||||
GCS->>GCS: Start timeout
|
||||
Drone-- >>GCS: MISSION_ACK
|
||||
-->
|
||||
|
||||
In more detail, the sequence of operations is:
|
||||
|
||||
1. GCS/API sends [MISSION_CLEAR_ALL](../messages/common.md#MISSION_CLEAR_ALL)
|
||||
- A [timeout](#timeout) is started for the GCS to wait on `MISSION_ACK` from Drone.
|
||||
2. Drone receives the message, and clears the mission from storage.
|
||||
3. Drone responds with [MISSION_ACK](../messages/common.md#MISSION_ACK) with result `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED) indicating success.
|
||||
4. GCS receives `MISSION_ACK` and clears its own stored information about the mission.
|
||||
The operation is now complete.
|
||||
|
||||
Note:
|
||||
|
||||
- A [timeout](#timeout) is set for every message that requires a response (e.g. `MISSION_CLEAR_ALL`).
|
||||
If the timeout expires without a response being received then the request must be resent.
|
||||
- An [error](#errors) can be signaled in response to any request (in this case, just `MISSION_CLEAR_ALL`) using a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing an error code.
|
||||
This must cancel the operation.
|
||||
The GCS record of the mission (if any) should be retained.
|
||||
|
||||
### Canceling Operations {#cancel}
|
||||
|
||||
The above mission operations may be canceled by responding to any request (e.g. `MISSION_REQUEST_INT`) with a `MISSION_ACK` message containing the `MAV_MISSION_OPERATION_CANCELLED` error.
|
||||
|
||||
Both systems should then return themselves to the idle state (if the system does not receive the cancellation message it will resend the request; the recipient will then be in the idle state and may respond with an appropriate error for that state).
|
||||
|
||||
### Operation Exceptions
|
||||
|
||||
#### Timeouts and Retries {#timeout}
|
||||
|
||||
A timeout should be set for all messages that require a response.
|
||||
If the expected response is not received before the timeout then the message must be resent.
|
||||
If no response is received after a number of retries then the client must cancel the operation and return to an idle state.
|
||||
|
||||
The recommended timeout values before resending, and the number of retries are:
|
||||
|
||||
- Timeout (default): 1500 ms
|
||||
- Timeout (mission items): 250 ms.
|
||||
- Retries (max): 5
|
||||
|
||||
#### Errors/Completion {#errors}
|
||||
|
||||
All operations complete with a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing the result of the operation ([MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT)) in the `type` field.
|
||||
|
||||
On successful completion, the message must contain `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED); this is sent by the system that is receiving the command/data (e.g. the drone for mission upload or the GCS for mission download).
|
||||
|
||||
An operation may also complete with an error - `MISSION_ACK.type` set to [MAV_MISSION_ERROR](../messages/common.md#MAV_MISSION_ERROR) or some other error code in [MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT).
|
||||
This can occur in response to any message/anywhere in the sequence.
|
||||
|
||||
Errors are considered unrecoverable.
|
||||
If an error is sent, both ends of the system should reset themselves to the idle state and the current state of the mission on the vehicle should be unaltered.
|
||||
|
||||
Note:
|
||||
|
||||
- [timeouts](#timeout) are not considered errors.
|
||||
- Out-of-sequence messages in mission upload/download are recoverable, and are not treated as errors.
|
||||
|
||||
## Mission File Formats
|
||||
|
||||
The _defacto_ standard file format for exchanging missions/plans is discussed in: [File Formats > Mission Plain-Text File Format](../file_formats/index.md#mission_plain_text_file).
|
||||
|
||||
+124
-115
@@ -1,52 +1,57 @@
|
||||
# Mission Protocol
|
||||
# Mission (Plan) Protocol
|
||||
|
||||
The mission sub-protocol allows a GCS or developer API to exchange _mission_ (flight plan), _geofence_ and _safe point_ information with a drone/component.
|
||||
The mission sub-protocol allows a GCS or developer API to exchange separate plans containing _mission_ (flight plan), _geofence_ and _safe point_ information with a drone/component.
|
||||
|
||||
The protocol covers:
|
||||
|
||||
- Operations to upload, download and clear missions, set/get the current mission item number, and get notification when the current mission item has changed.
|
||||
- Message type(s) and enumerations for exchanging mission items.
|
||||
- Mission Items ("MAVLink commands") that are common to most systems.
|
||||
- Operations to upload, download and clear a plan.
|
||||
- Message type(s) and enumerations for exchanging plan items.
|
||||
- Plan items ("MAV_CMD") that can be used in the various types of plans.
|
||||
- Messages to notify of current mission plan state
|
||||
- Commands to start missions, set the current mission item number, and so on.
|
||||
|
||||
The protocol supports re-request of messages that have not arrived, which allows missions to be reliably transferred over a lossy link.
|
||||
|
||||
## Mission Types {#mission_types}
|
||||
## Plan Types {#mission_types}
|
||||
|
||||
MAVLink 2 supports three types of "missions": flight plans, geofences and rally/safe points.
|
||||
The protocol uses the same sequence of operations for all types (albeit with different types of [Mission Items](#mavlink_commands)).
|
||||
The protocols supports the uploading and downloading of three types of plan: flight plans ("missions"), geofence plans, and rally/safe points plans.
|
||||
|
||||
The same sequence of operations is used for exchanging all types (albeit containing different allowed [MAV_CMD](#mavlink_commands) payloads).
|
||||
The mission types must be stored and handled separately/independently.
|
||||
|
||||
Mission protocol messages include the type of associated mission in the `mission_type` field (a MAVLink 2 message extension).
|
||||
Messages used by this protocol include the type of associated mission in the `mission_type` field (a MAVLink 2 message extension).
|
||||
The field takes one of the [MAV_MISSION_TYPE](../messages/common.md#MAV_MISSION_TYPE) enum values:
|
||||
[MAV_MISSION_TYPE_MISSION](../messages/common.md#MAV_MISSION_TYPE_MISSION), [MAV_MISSION_TYPE_FENCE](../messages/common.md#MAV_MISSION_TYPE_FENCE), [MAV_MISSION_TYPE_RALLY](../messages/common.md#MAV_MISSION_TYPE_RALLY).
|
||||
|
||||
:::info
|
||||
MAVLink 1 supports only "regular" flight-plan missions (this is implied/not explicitly set).
|
||||
MAVLink 1 supports only flight-plan missions (this is implied/not explicitly set).
|
||||
:::
|
||||
|
||||
## Mission Items (MAVLink Commands) {#mavlink_commands}
|
||||
## Plan Items (MAVLink Commands) {#mavlink_commands}
|
||||
|
||||
Mission items for all the [mission types](#mission_types) are defined in the [MAV_CMD](../messages/common.md#mav_commands) enum.
|
||||
Mission items (or more generically "Plan items") for all the [plan types](#mission_types) are defined in the [MAV_CMD](../messages/common.md#mav_commands) enum.
|
||||
|
||||
:::info
|
||||
[MAV_CMD](../messages/common.md#mav_commands) is used to define commands that can be used in missions ("mission items") and commands that can be sent outside of a mission context (using the [Command Protocol](../services/command.md)).
|
||||
[MAV_CMD](../messages/common.md#mav_commands) is used to define commands that can be used in plans ("mission items") and commands that can be sent outside of a mission context (using the [Command Protocol](../services/command.md)).
|
||||
Some `MAV_CMD` can be used with both mission and command protocols.
|
||||
Not all commands/mission items are supported on all systems (or for all flight modes).
|
||||
Not all commands/plan items are supported on all systems (or for all flight modes).
|
||||
:::
|
||||
|
||||
The items for the different types of mission are identified using a simple name prefix convention:
|
||||
The items for the different types of plan are usually identified using a simple name prefix convention:
|
||||
|
||||
- _Flight plans_:
|
||||
- NAV commands (`MAV_CMD_NAV_*`) for navigation/movement (e.g. [MAV_CMD_NAV_WAYPOINT](../messages/common.md#MAV_CMD_NAV_WAYPOINT), [MAV_CMD_NAV_LAND](../messages/common.md#MAV_CMD_NAV_LAND))
|
||||
- DO commands (`MAV_CMD_DO_*`) for immediate actions like changing speed or activating a servo (e.g. [MAV_CMD_DO_CHANGE_SPEED](../messages/common.md#MAV_CMD_DO_CHANGE_SPEED)).
|
||||
- CONDITION commands (`MAV_CMD_CONDITION_*`) for changing the execution of the mission based on a condition - e.g. pausing the mission for a time before executing next command ([MAV_CMD_CONDITION_DELAY](../messages/common.md#MAV_CMD_CONDITION_DELAY)).
|
||||
- _Geofence mission items_:
|
||||
- _Geofence plan_:
|
||||
- Prefixed with `MAV_CMD_NAV_FENCE_` (e.g. [MAV_CMD_NAV_FENCE_RETURN_POINT](../messages/common.md#MAV_CMD_NAV_FENCE_RETURN_POINT)).
|
||||
- _Rally point mission items_:
|
||||
- There is just one rally point `MAV_CMD`: [MAV_CMD_NAV_RALLY_POINT](../messages/common.md#MAV_CMD_NAV_RALLY_POINT).
|
||||
- _Rally point plan_:
|
||||
- Rally points are defined using [MAV_CMD_NAV_RALLY_POINT](../messages/common.md#MAV_CMD_NAV_RALLY_POINT).
|
||||
|
||||
Mission items (`MAV_CMD`) are transmitted/encoded in [MISSION_ITEM_INT](#MISSION_ITEM_INT) messages.
|
||||
This message includes fields to identify the particular mission item (command id) and up to 7 command-specific optional parameters.
|
||||
## Plan Payload Message
|
||||
|
||||
Plan items (`MAV_CMD`) are transmitted/encoded in [MISSION_ITEM_INT](#MISSION_ITEM_INT) messages.
|
||||
This message includes fields to identify the particular plan item (command id) and up to 7 command-specific optional parameters.
|
||||
|
||||
| Field Name | Type | 值 | 描述 |
|
||||
| ----------------------------- | ----------------------------- | ------------------------------------------------------------------ | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
@@ -62,7 +67,7 @@ This message includes fields to identify the particular mission item (command id
|
||||
The first four parameters (shown above) can be used for any purpose - this depends on the particular [command](../messages/common.md#mav_commands).
|
||||
The last three parameters (x, y, z) are used for positional information in `MAV_CMD_NAV_*` commands, but can be used for any purpose in other commands.
|
||||
|
||||
The remaining message fields are used for addressing, defining the mission type, specifying the reference frame used for x, y, z in `MAV_CMD_NAV_*` messages, etc.:
|
||||
The remaining message fields are used for addressing, defining the plan type, specifying the reference frame used for x, y, z in `MAV_CMD_NAV_*` messages, etc.:
|
||||
|
||||
| Field Name | Type | 值 | 描述 |
|
||||
| ------------------------------------- | ----------------------------- | ------------------------------------------------------------------------------- | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
@@ -80,15 +85,15 @@ The following messages and enums are used by the service.
|
||||
|
||||
| 消息 | 描述 |
|
||||
| --------------------------------------------------------------------------------------------------------------------------------------------- | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| <a id="MISSION_REQUEST_LIST"></a>[MISSION_REQUEST_LIST](../messages/common.md#MISSION_REQUEST_LIST) | Initiate [mission download](#download_mission) from a system by requesting the list of mission items. |
|
||||
| <a id="MISSION_REQUEST_LIST"></a>[MISSION_REQUEST_LIST](../messages/common.md#MISSION_REQUEST_LIST) | Initiate [mission download](#download_mission) from a system by requesting the list of plan items. |
|
||||
| <a id="MISSION_COUNT"></a>[MISSION_COUNT](../messages/common.md#MISSION_COUNT) | Send the number of items in a mission. This is used to initiate [mission upload](#uploading_mission) or as a response to [MISSION_REQUEST_LIST](#MISSION_REQUEST_LIST) when [downloading a mission](#download_mission). |
|
||||
| <a id="MISSION_REQUEST_INT"></a>[MISSION_REQUEST_INT](../messages/common.md#MISSION_REQUEST_INT) | Request mission item data for a specific sequence number be sent by the recipient using a [MISSION_ITEM_INT](#MISSION_ITEM_INT) message. Used for mission [upload](#uploading_mission) and [download](#download_mission). |
|
||||
| <a id="MISSION_ITEM_INT"></a>[MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) | Message encoding a [mission item/command](#mavlink_commands) (defined in a [MAV_CMD](#MAV_CMD)). Used for mission [upload](#uploading_mission) and [download](#download_mission). |
|
||||
| <a id="MISSION_REQUEST_INT"></a>[MISSION_REQUEST_INT](../messages/common.md#MISSION_REQUEST_INT) | Request plan item data for a specific sequence number be sent by the recipient using a [MISSION_ITEM_INT](#MISSION_ITEM_INT) message. Used for plan [upload](#uploading_mission) and [download](#download_mission). |
|
||||
| <a id="MISSION_ITEM_INT"></a>[MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) | Message encoding a [plan item/command](#mavlink_commands) (defined in a [MAV_CMD](#MAV_CMD)). Used for plan [upload](#uploading_mission) and [download](#download_mission). |
|
||||
| <a id="MISSION_ACK"></a>[MISSION_ACK](../messages/common.md#MISSION_ACK) | Acknowledgment message when a system completes a [mission operation](#operations) (e.g. sent by autopilot after it has uploaded all mission items). The message includes a [MAV_MISSION_RESULT](#MAV_MISSION_RESULT) indicating either success or the type of failure. |
|
||||
| <a id="MISSION_CURRENT"></a>[MISSION_CURRENT](../messages/common.md#MISSION_CURRENT) | Message containing the current mission item sequence number. This is streamed and also emitted when the [current mission item is set/changed](#current_mission_item). |
|
||||
| <a id="MISSION_SET_CURRENT"></a>[MISSION_SET_CURRENT](../messages/common.md#MISSION_SET_CURRENT) | [Set the current mission item](#current_mission_item) by sequence number (continue to this item on the shortest path). |
|
||||
| <a id="STATUSTEXT"></a>[STATUSTEXT](../messages/common.md#STATUSTEXT) | Sent to notify systems when a request to [set the current mission item](#current_mission_item) fails. |
|
||||
| <a id="MISSION_CLEAR_ALL"></a>[MISSION_CLEAR_ALL](../messages/common.md#MISSION_CLEAR_ALL) | Message sent to [clear/delete all mission items](#clear_mission) stored on a system. |
|
||||
| <a id="MISSION_CLEAR_ALL"></a>[MISSION_CLEAR_ALL](../messages/common.md#MISSION_CLEAR_ALL) | Message sent to [clear/delete all plan items of a particular type](#clear_mission) stored on a system. |
|
||||
| <a id="MISSION_ITEM_REACHED"></a>[MISSION_ITEM_REACHED](../messages/common.md#MISSION_ITEM_REACHED) | Message emitted by system whenever it reaches a new waypoint. Used to [monitor progress](#monitor_progress). |
|
||||
|
||||
| Command | 描述 |
|
||||
@@ -100,7 +105,7 @@ The following messages and enums are used by the service.
|
||||
| <a id="MAV_MISSION_TYPE"></a>[MAV_MISSION_TYPE](../messages/common.md#MAV_MISSION_TYPE) | [Mission type](#mission_types) for message (mission, geofence, rallypoints). |
|
||||
| <a id="MAV_MISSION_RESULT"></a>[MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT) | Used to indicate the success or failure reason for an operation (e.g. to upload or download a mission). This is carried in a [MISSION_ACK](#MISSION_ACK). |
|
||||
| <a id="MAV_FRAME"></a>[MAV_FRAME](../messages/common.md#MAV_FRAME) | Co-ordinate frame for position/velocity/acceleration data in the message. |
|
||||
| <a id="MAV_CMD"></a>[MAV_CMD](../messages/common.md#mav_commands) | [Mission Items](#mavlink_commands) (and MAVLink commands) sent in [MISSION_ITEM_INT](#MISSION_ITEM_INT). |
|
||||
| <a id="MAV_CMD"></a>[MAV_CMD](../messages/common.md#mav_commands) | [Plan Items](#mavlink_commands) (and MAVLink commands) sent in [MISSION_ITEM_INT](#MISSION_ITEM_INT). |
|
||||
|
||||
## Deprecated Types: MISSION_ITEM {#command_message_type}
|
||||
|
||||
@@ -123,7 +128,7 @@ The table below shows that the positional parameters can be local (x, y, z), glo
|
||||
The co-ordinate frame of positional parameters is defined in the `MISSION_ITEM_INT.frame` field using a [MAV_FRAME](#MAV_FRAME) value.
|
||||
|
||||
The global frames are prefixed with `MAV_FRAME_GLOBAL_*`.
|
||||
Mission items should use frame variants that have the suffix `_INT`: e.g. `MAV_FRAME_GLOBAL_RELATIVE_ALT_INT`, `MAV_FRAME_GLOBAL_INT`, `MAV_FRAME_GLOBAL_TERRAIN_ALT_INT`.
|
||||
Plan items should use frame variants that have the suffix `_INT`: e.g. `MAV_FRAME_GLOBAL_RELATIVE_ALT_INT`, `MAV_FRAME_GLOBAL_INT`, `MAV_FRAME_GLOBAL_TERRAIN_ALT_INT`.
|
||||
When using these frames, latitude and longitude values must be encoded by multiplying the degrees by 1E7 (e.g. the latitude 69.69000000 would be sent as 69.69000000x1E7 = 696900000).
|
||||
Using int32 of degrees \* 10^7 has higher resolution than could be achieved with single floating point.
|
||||
|
||||
@@ -154,16 +159,17 @@ Don't use [MAV_FRAME_MISSION](../messages/common.md#MAV_FRAME_MISSION) for missi
|
||||
`Param5`, `param6`, `param7` may also be used for non-positional information.
|
||||
In this case the [MISSION_ITEM_INT.frame](#MISSION_ITEM_INT) should be set to [MAV_FRAME_MISSION](../messages/common.md#MAV_FRAME_MISSION) (this is equivalent to say "the frame data is irrelevant").
|
||||
|
||||
As param5 and param6 are sent in _integer_ fields, generally you should design mission items/MAV_CMDs such that these only include integer data (and are sent as-is/unscaled).
|
||||
If these must be used for real numbers and scaling is required, then this must be noted in the mission item itself.
|
||||
As `param5` and `param6` are sent in _integer_ fields, generally you should design mission items/MAV_CMDs such that these only include integer data (and are sent as-is/unscaled).
|
||||
If these must be used for real numbers and scaling is required, then this must be noted in the plan item itself.
|
||||
|
||||
## Operations {#operations}
|
||||
|
||||
This section defines all the protocol operations.
|
||||
This section defines the operations for detecting changes to the plan, upload and download, and clearing the plan.
|
||||
It is common to all plan types.
|
||||
|
||||
### Detecting Mission/Plan Changes
|
||||
### Detecting Plan Changes
|
||||
|
||||
Mission upload and download can be expensive operations, in particular for large missions.
|
||||
Plan upload and download can be expensive operations, in particular for large missions.
|
||||
A GCS can avoid unnecessary uploads and downloads by first checking whether it has a matching id(s) for the corresponding plan on the vehicle.
|
||||
|
||||
The current id for different parts of the plan are streamed in [MISSION_CURRENT](#MISSION_CURRENT) message, using the appropriately named fields: `mission_id`, `fence_id`, `rally_points_id`.
|
||||
@@ -177,9 +183,9 @@ On upload, the generated ID is sent to the GCS in the final part of the upload s
|
||||
On download, the stored ID is sent to the GCS in the [MISSION_COUNT.opaque_id](#MISSION_COUNT) field.
|
||||
|
||||
The GCS should store the value of the ID from the flight stack as the "current id" for whatever part of the plan was uploaded/downloaded.
|
||||
It can then monitor `MISSION_CURRENT`, and check its cached values against the current plan ids to determine whether it has a matching mission, or needs to download the mission from the vehicle.
|
||||
It can then monitor `MISSION_CURRENT`, and check its cached values against the current plan ids to determine whether it has a matching plan, or needs to download the plan from the vehicle.
|
||||
|
||||
### Upload a Mission to the Vehicle {#uploading_mission}
|
||||
### Upload a Plan to the Vehicle {#uploading_mission}
|
||||
|
||||
The diagram below shows the communication sequence to upload a mission to a drone (assuming all operations succeed).
|
||||
|
||||
@@ -193,7 +199,7 @@ Mission upload/download can be bandwidth intensive and time consuming.
|
||||
[Check for plan changes](#detecting-missionplan-changes) before uploading (or downloading) a mission.
|
||||
:::
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fQ09VTlRcbiAgICBHQ1MtPj5HQ1M6IFN0YXJ0IHRpbWVvdXRcbiAgICBEcm9uZS0-PkdDUzogTUlTU0lPTl9SRVFVRVNUX0lOVCAoMClcbiAgICBEcm9uZS0-PkRyb25lOiBTdGFydCB0aW1lb3V0XG4gICAgR0NTLS0-PkRyb25lOiBNSVNTSU9OX0lURU1fSU5UICgwKVxuICAgIE5vdGUgb3ZlciBHQ1MsRHJvbmU6IC4uLiBpdGVyYXRlIHRocm91Z2ggaXRlbXMgLi4uXG4gICAgRHJvbmUtPj5HQ1M6IE1JU1NJT05fUkVRVUVTVF9JTlQgKGNvdW50LTEpXG4gICAgRHJvbmUtPj5Ecm9uZTogU3RhcnQgdGltZW91dFxuICAgIEdDUy0tPj5Ecm9uZTogTUlTU0lPTl9JVEVNX0lOVCAoY291bnQtMSlcbiAgICBEcm9uZS0-PkdDUzogTUlTU0lPTl9BQ0siLCJtZXJtYWlkIjp7InRoZW1lIjoiZGVmYXVsdCJ9LCJ1cGRhdGVFZGl0b3IiOmZhbHNlfQ)
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fQ09VTlRcbiAgICBHQ1MtPj5HQ1M6IFN0YXJ0IHRpbWVvdXRcbiAgICBEcm9uZS0-PkdDUzogTUlTU0lPTl9SRVFVRVNUX0lOVCAoMClcbiAgICBEcm9uZS0-PkRyb25lOiBTdGFydCB0aW1lb3V0XG4gICAgR0NTLS0-PkRyb25lOiBNSVNTSU9OX0lURU1fSU5UICgwKVxuICAgIE5vdGUgb3ZlciBHQ1MsRHJvbmU6IC4uLiBpdGVyYXRlIHRocm91Z2ggaXRlbXMgLi4uXG4gICAgRHJvbmUtPj5HQ1M6IE1JU1NJT05fUkVRVUVTVF9JTlQgKGNvdW50LTEpXG4gICAgRHJvbmUtPj5Ecm9uZTogU3RhcnQgdGltZW91dFxuICAgIEdDUy0tPj5Ecm9uZTogTUlTU0lPTl9JVEVNX0lOVCAoY291bnQtMSlcbiAgICBEcm9uZS0-PkdDUzogTUlTU0lPTl9BQ0siLCJtZXJtYWlkIjp7InRoZW1lIjoiZGVmYXVsdCJ9LCJ1cGRhdGVFZGl0b3IiOmZhbHNlfQ)
|
||||
|
||||
<!-- Original sequence diagram
|
||||
sequenceDiagram;
|
||||
@@ -213,13 +219,13 @@ sequenceDiagram;
|
||||
|
||||
In more detail, the sequence of operations is:
|
||||
|
||||
1. GCS sends [MISSION_COUNT](../messages/common.md#MISSION_COUNT) including the number of mission items to be uploaded (`count`).
|
||||
1. GCS sends [MISSION_COUNT](../messages/common.md#MISSION_COUNT) including the number of plan items (`MISSION_ITEM_INT`) to be uploaded (`count`).
|
||||
- A [timeout](#timeout) must be started for the GCS to wait on the response from Drone (`MISSION_REQUEST_INT`).
|
||||
2. Drone receives message and responds with [MISSION_REQUEST_INT](../messages/common.md#MISSION_REQUEST_INT) requesting the first mission item (`seq==0`).
|
||||
2. Drone receives message and responds with [MISSION_REQUEST_INT](../messages/common.md#MISSION_REQUEST_INT) requesting the first plan item (`seq==0`).
|
||||
- A [timeout](#timeout) must be started for the Drone to wait on the `MISSION_ITEM_INT` response from GCS.
|
||||
3. GCS receives `MISSION_REQUEST_INT` and responds with the requested mission item in a [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) message.
|
||||
3. GCS receives `MISSION_REQUEST_INT` and responds with the requested item in a [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) message.
|
||||
4. Drone and GCS repeat the `MISSION_REQUEST_INT`/`MISSION_ITEM_INT` cycle, iterating `seq` until all items are uploaded (`seq==count-1`).
|
||||
5. After receiving the last mission item the drone responds with [MISSION_ACK](../messages/common.md#MISSION_ACK) with the `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED) indicating mission upload completion/success.
|
||||
5. After receiving the last plan item the drone responds with [MISSION_ACK](../messages/common.md#MISSION_ACK) with the `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED) indicating mission upload completion/success.
|
||||
- The drone should set the new mission to be the current mission, discarding the original data.
|
||||
- The drone considers the upload complete.
|
||||
6. GCS receives `MISSION_ACK` containing `MAV_MISSION_ACCEPTED` to indicate the operation is complete.
|
||||
@@ -229,25 +235,25 @@ Notes:
|
||||
|
||||
- A [timeout](#timeout) is set for every message that requires a response (e.g. `MISSION_REQUEST_INT`).
|
||||
If the timeout expires without a response being received then the request must be resent.
|
||||
- Mission items must be received in order.
|
||||
- Plan items must be received in order.
|
||||
If an item is received out-of-sequence the expected item should be re-requested by the vehicle (the out-of-sequence item is dropped).
|
||||
- An [error](#errors) can be signaled in response to any request using a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing an error code.
|
||||
This must cancel the operation and restore the mission to its previous state.
|
||||
For example, the drone might respond to the [MISSION_COUNT](../messages/common.md#MISSION_COUNT) request with a [MAV_MISSION_NO_SPACE](../messages/common.md#MAV_MISSION_NO_SPACE) if there isn't enough space to upload the mission.
|
||||
- The sequence above shows the [mission items](#mavlink_commands) packaged in [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) messages.
|
||||
- The sequence above shows the [plan items](#mavlink_commands) packaged in [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) messages.
|
||||
Protocol implementations must also support [MISSION_ITEM](../messages/common.md#MISSION_ITEM) and [MISSION_REQUEST](../messages/common.md#MISSION_REQUEST) in the same way.
|
||||
- Uploading an empty mission ([MISSION_COUNT](../messages/common.md#MISSION_COUNT) is 0) has the same effect as [clearing the mission](#clear_mission).
|
||||
|
||||
### Download a Mission from the Vehicle {#download_mission}
|
||||
### Download a Plan from the Vehicle {#download_mission}
|
||||
|
||||
:::info
|
||||
Mission upload/download can also be bandwidth intensive and time consuming.
|
||||
Plan upload/download can be bandwidth intensive and time consuming.
|
||||
[Check for plan changes](#detecting-missionplan-changes) before downloading (or uploading) a mission.
|
||||
:::
|
||||
|
||||
The diagram below shows the communication sequence to download a mission from a drone (assuming all operations succeed).
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9MSVNUXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0NPVU5UXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9JTlQgKDApXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0lURU1fSU5UICgwKVxuICAgIE5vdGUgb3ZlciBHQ1MsRHJvbmU6IC4uLiBpdGVyYXRlIHRocm91Z2ggaXRlbXMgLi4uXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9JTlQgKGNvdW50LTEpXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0lURU1fSU5UIChjb3VudC0xKVxuICAgIEdDUy0-PkRyb25lOiBNSVNTSU9OX0FDSyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9MSVNUXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0NPVU5UXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9JTlQgKDApXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0lURU1fSU5UICgwKVxuICAgIE5vdGUgb3ZlciBHQ1MsRHJvbmU6IC4uLiBpdGVyYXRlIHRocm91Z2ggaXRlbXMgLi4uXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fUkVRVUVTVF9JTlQgKGNvdW50LTEpXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0lURU1fSU5UIChjb3VudC0xKVxuICAgIEdDUy0-PkRyb25lOiBNSVNTSU9OX0FDSyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
<!-- original sequence
|
||||
sequenceDiagram;
|
||||
@@ -266,9 +272,9 @@ sequenceDiagram;
|
||||
GCS->>Drone: MISSION_ACK
|
||||
-->
|
||||
|
||||
The sequence is similar to that for [uploading a mission](#uploading_mission).
|
||||
The sequence is similar to that for [uploading a plan](#uploading_mission).
|
||||
The main difference is that the client (e.g. GCS) sends [MISSION_REQUEST_LIST](../messages/common.md#MISSION_REQUEST_LIST), which triggers the autopilot to respond with the current count of items ([MISSION_COUNT](#MISSION_COUNT)).
|
||||
This starts a cycle where the GCS requests mission items, and the drone supplies them.
|
||||
This starts a cycle where the GCS requests plan items, and the drone supplies them.
|
||||
|
||||
Note:
|
||||
|
||||
@@ -283,9 +289,81 @@ Note:
|
||||
- The sequence above shows the [mission items](#mavlink_commands) packaged in [MISSION_ITEM_INT](../messages/common.md#MISSION_ITEM_INT) messages.
|
||||
Protocol implementations must also support [MISSION_ITEM](../messages/common.md#MISSION_ITEM) and [MISSION_REQUEST](../messages/common.md#MISSION_REQUEST) in the same way.
|
||||
|
||||
### Clear Plan {#clear_mission}
|
||||
|
||||
The diagram below shows the communication sequence to clear a plan from a drone (assuming all operations succeed).
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fQ0xFQVJfQUxMXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0FDSyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
<!--
|
||||
sequenceDiagram;
|
||||
participant GCS
|
||||
participant Drone
|
||||
GCS->>Drone: MISSION_CLEAR_ALL
|
||||
GCS->>GCS: Start timeout
|
||||
Drone-- >>GCS: MISSION_ACK
|
||||
-->
|
||||
|
||||
In more detail, the sequence of operations is:
|
||||
|
||||
1. GCS/API sends [MISSION_CLEAR_ALL](../messages/common.md#MISSION_CLEAR_ALL)
|
||||
- A [timeout](#timeout) is started for the GCS to wait on `MISSION_ACK` from Drone.
|
||||
2. Drone receives the message, and clears the specified plan type from storage.
|
||||
3. Drone responds with [MISSION_ACK](../messages/common.md#MISSION_ACK) with result `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED) indicating success.
|
||||
4. GCS receives `MISSION_ACK` and clears its own stored information about the mission.
|
||||
The operation is now complete.
|
||||
|
||||
Note:
|
||||
|
||||
- A [timeout](#timeout) is set for every message that requires a response (e.g. `MISSION_CLEAR_ALL`).
|
||||
If the timeout expires without a response being received then the request must be resent.
|
||||
- An [error](#errors) can be signaled in response to any request (in this case, just `MISSION_CLEAR_ALL`) using a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing an error code.
|
||||
This must cancel the operation.
|
||||
The GCS record of the mission (if any) should be retained.
|
||||
|
||||
### Canceling Operations {#cancel}
|
||||
|
||||
The above mission operations may be canceled by responding to any request (e.g. `MISSION_REQUEST_INT`) with a `MISSION_ACK` message containing the `MAV_MISSION_OPERATION_CANCELLED` error.
|
||||
|
||||
Both systems should then return themselves to the idle state (if the system does not receive the cancellation message it will resend the request; the recipient will then be in the idle state and may respond with an appropriate error for that state).
|
||||
|
||||
### Operation Exceptions
|
||||
|
||||
#### Timeouts and Retries {#timeout}
|
||||
|
||||
A timeout should be set for all messages that require a response.
|
||||
If the expected response is not received before the timeout then the message must be resent.
|
||||
If no response is received after a number of retries then the client must cancel the operation and return to an idle state.
|
||||
|
||||
The recommended timeout values before resending, and the number of retries are:
|
||||
|
||||
- Timeout (default): 1500 ms
|
||||
- Timeout (plan items): 250 ms.
|
||||
- Retries (max): 5
|
||||
|
||||
#### Errors/Completion {#errors}
|
||||
|
||||
All operations complete with a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing the result of the operation ([MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT)) in the `type` field.
|
||||
|
||||
On successful completion, the message must contain `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED); this is sent by the system that is receiving the command/data (e.g. the drone for mission upload or the GCS for mission download).
|
||||
|
||||
An operation may also complete with an error - `MISSION_ACK.type` set to [MAV_MISSION_ERROR](../messages/common.md#MAV_MISSION_ERROR) or some other error code in [MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT).
|
||||
This can occur in response to any message/anywhere in the sequence.
|
||||
|
||||
Errors are considered unrecoverable.
|
||||
If an error is sent, both ends of the system should reset themselves to the idle state and the current state of the mission on the vehicle should be unaltered.
|
||||
|
||||
Note:
|
||||
|
||||
- [timeouts](#timeout) are not considered errors.
|
||||
- Out-of-sequence messages in mission upload/download are recoverable, and are not treated as errors.
|
||||
|
||||
## Mission Management Operations {#mission_management}
|
||||
|
||||
### Set Current Mission Item {#current_mission_item}
|
||||
|
||||
The diagram below shows the communication sequence to set the current mission item.
|
||||
Note that here we mean "mission" not plan, since rally points and geofences are not executed sequentially.
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fU0VUX0NVUlJFTlRcbiAgICBEcm9uZS0tPj5HQ1M6IE1JU1NJT05fQ1VSUkVOVCIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
@@ -320,75 +398,6 @@ GCS/developer API can monitor progress by handling the appropriate messages sent
|
||||
The message contains the `seq` number of the current mission item.
|
||||
- The vehicle must also broadcast a [MISSION_CURRENT](../messages/common.md#MISSION_CURRENT) message if the [current mission item](#current_mission_item) is changed.
|
||||
|
||||
### Clear Missions {#clear_mission}
|
||||
|
||||
The diagram below shows the communication sequence to clear the mission from a drone (assuming all operations succeed).
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1JU1NJT05fQ0xFQVJfQUxMXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtLT4-R0NTOiBNSVNTSU9OX0FDSyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
<!--
|
||||
sequenceDiagram;
|
||||
participant GCS
|
||||
participant Drone
|
||||
GCS->>Drone: MISSION_CLEAR_ALL
|
||||
GCS->>GCS: Start timeout
|
||||
Drone-- >>GCS: MISSION_ACK
|
||||
-->
|
||||
|
||||
In more detail, the sequence of operations is:
|
||||
|
||||
1. GCS/API sends [MISSION_CLEAR_ALL](../messages/common.md#MISSION_CLEAR_ALL)
|
||||
- A [timeout](#timeout) is started for the GCS to wait on `MISSION_ACK` from Drone.
|
||||
2. Drone receives the message, and clears the mission from storage.
|
||||
3. Drone responds with [MISSION_ACK](../messages/common.md#MISSION_ACK) with result `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED) indicating success.
|
||||
4. GCS receives `MISSION_ACK` and clears its own stored information about the mission.
|
||||
The operation is now complete.
|
||||
|
||||
Note:
|
||||
|
||||
- A [timeout](#timeout) is set for every message that requires a response (e.g. `MISSION_CLEAR_ALL`).
|
||||
If the timeout expires without a response being received then the request must be resent.
|
||||
- An [error](#errors) can be signaled in response to any request (in this case, just `MISSION_CLEAR_ALL`) using a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing an error code.
|
||||
This must cancel the operation.
|
||||
The GCS record of the mission (if any) should be retained.
|
||||
|
||||
### Canceling Operations {#cancel}
|
||||
|
||||
The above mission operations may be canceled by responding to any request (e.g. `MISSION_REQUEST_INT`) with a `MISSION_ACK` message containing the `MAV_MISSION_OPERATION_CANCELLED` error.
|
||||
|
||||
Both systems should then return themselves to the idle state (if the system does not receive the cancellation message it will resend the request; the recipient will then be in the idle state and may respond with an appropriate error for that state).
|
||||
|
||||
### Operation Exceptions
|
||||
|
||||
#### Timeouts and Retries {#timeout}
|
||||
|
||||
A timeout should be set for all messages that require a response.
|
||||
If the expected response is not received before the timeout then the message must be resent.
|
||||
If no response is received after a number of retries then the client must cancel the operation and return to an idle state.
|
||||
|
||||
The recommended timeout values before resending, and the number of retries are:
|
||||
|
||||
- Timeout (default): 1500 ms
|
||||
- Timeout (mission items): 250 ms.
|
||||
- Retries (max): 5
|
||||
|
||||
#### Errors/Completion {#errors}
|
||||
|
||||
All operations complete with a [MISSION_ACK](../messages/common.md#MISSION_ACK) message containing the result of the operation ([MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT)) in the `type` field.
|
||||
|
||||
On successful completion, the message must contain `type` of [MAV_MISSION_ACCEPTED](../messages/common.md#MAV_MISSION_ACCEPTED); this is sent by the system that is receiving the command/data (e.g. the drone for mission upload or the GCS for mission download).
|
||||
|
||||
An operation may also complete with an error - `MISSION_ACK.type` set to [MAV_MISSION_ERROR](../messages/common.md#MAV_MISSION_ERROR) or some other error code in [MAV_MISSION_RESULT](../messages/common.md#MAV_MISSION_RESULT).
|
||||
This can occur in response to any message/anywhere in the sequence.
|
||||
|
||||
Errors are considered unrecoverable.
|
||||
If an error is sent, both ends of the system should reset themselves to the idle state and the current state of the mission on the vehicle should be unaltered.
|
||||
|
||||
Note:
|
||||
|
||||
- [timeouts](#timeout) are not considered errors.
|
||||
- Out-of-sequence messages in mission upload/download are recoverable, and are not treated as errors.
|
||||
|
||||
## Mission File Formats
|
||||
|
||||
The _defacto_ standard file format for exchanging missions/plans is discussed in: [File Formats > Mission Plain-Text File Format](../file_formats/index.md#mission_plain_text_file).
|
||||
|
||||
Reference in New Issue
Block a user