mirror of
https://github.com/mavlink/mavlink-devguide.git
synced 2026-06-19 07:36:26 +00:00
New Crowdin updates (#620)
* New translations uavionix.md (Korean) * New translations loweheiser.md (Korean) * New translations uavionix.md (Chinese Simplified) * New translations loweheiser.md (Chinese Simplified) * New translations common.md (Korean) * New translations common.md (Chinese Simplified) * New translations mavlink_version.md (Korean) * New translations mavlink_version.md (Chinese Simplified)
This commit is contained in:
@@ -44,7 +44,7 @@ This is sufficient if the communication link between autopilot and GCS is comple
|
||||
However, most communication links are not completely transparent as they either include routing or in case of fixed-length wireless implementations on packetization.
|
||||
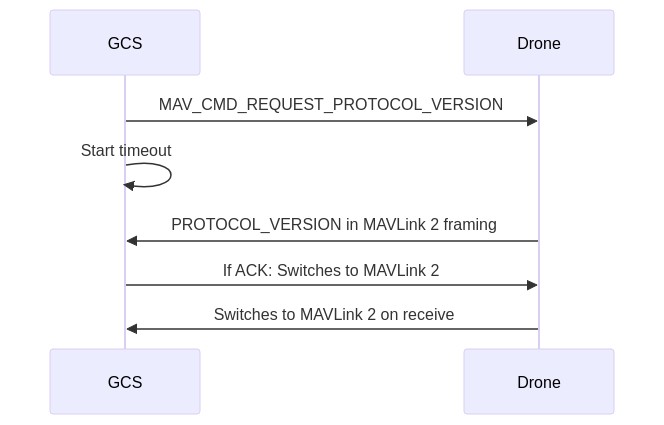
In order to also test the link, the _MAVLink 2_ handshake protocol sends a _MAVLink 2_ frame to test the complete communication chain.
|
||||
|
||||
To do so, the GCS sends a [COMMAND_LONG](../messages/common.md#COMMAND_LONG) or [COMMAND_INT](../messages/common.md#COMMAND_INT) message with the command ID [MAV_CMD_REQUEST_PROTOCOL_VERSION](../messages/common.md#MAV_CMD_REQUEST_PROTOCOL_VERSION).
|
||||
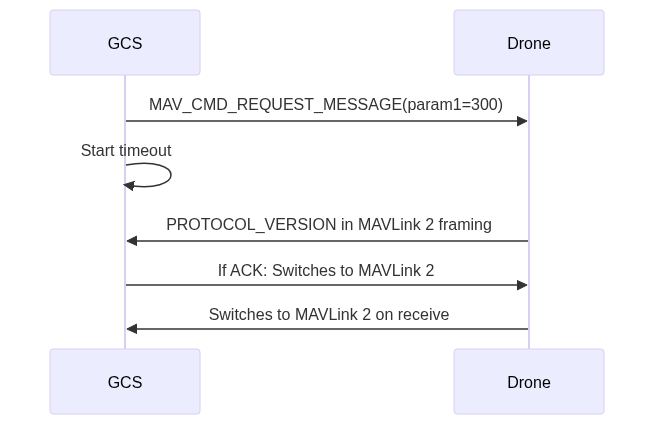
To do so, the GCS sends a [COMMAND_LONG](../messages/common.md#COMMAND_LONG) or [COMMAND_INT](../messages/common.md#COMMAND_INT) message with the command ID [MAV_CMD_REQUEST_MESSAGE](../messages/common.md#MAV_CMD_REQUEST_MESSAGE) and param1=300 (PROTOCOL_VERSION)
|
||||
|
||||
If the system supports _MAVLink 2_ and the handshake it will respond with [PROTOCOL_VERSION](../messages/common.md#PROTOCOL_VERSION) **encoded as MAVLink 2 packet**.
|
||||
If it does not support _MAVLink 2_ it should `NACK` the command.
|
||||
@@ -52,13 +52,13 @@ The GCS should fall back to a timeout in case the command interface is not imple
|
||||
|
||||
The diagram below illustrates the complete sequence.
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1BVl9DTURfUkVRVUVTVF9QUk9UT0NPTF9WRVJTSU9OXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtPj5HQ1M6IFBST1RPQ09MX1ZFUlNJT04gaW4gTUFWTGluayAyIGZyYW1pbmdcbiAgICBHQ1MtPj5Ecm9uZTogSWYgQUNLOiBTd2l0Y2hlcyB0byBNQVZMaW5rIDJcbiAgICBEcm9uZS0-PkdDUzogU3dpdGNoZXMgdG8gTUFWTGluayAyIG9uIHJlY2VpdmUiLCJtZXJtYWlkIjp7InRoZW1lIjoiZGVmYXVsdCJ9LCJ1cGRhdGVFZGl0b3IiOmZhbHNlfQ)
|
||||
[](https://mermaid.live/edit#pako:eNptkG1rwjAQx79KuFcbOEkftJoxQWoRma6bdb4YBQntVcNs4mK6J_G7L1bcxmZeHLn_3f93x-0gUzkCgy2-VCgzHAi-1Ly8TiWxb8O1EZnYcGnIMEz-iwOtJB5lW7_q9WqBkUl_vggng8U0eniMktliEiVJfxhdWC8vnRuP0svfLhsZSYwFEyNKVJU5VmvaqX4_jWdxGI8X82iajOI7IuRhzljIZ-KSwoKFXJ7ZZVSQfnhr-W_CZCvcEqN-fGfmnO0jShKNGYpXhAYstciBGV1hA0rUJT-ksDvAUjArLDEFZr85FrxamxRSubc2e7InpcqTU6tquQJW8PXWZtUm5-Z0_z9qlAuj9LeoUeaoQ1VJAyzwazCwHbwDa9NW02tT2mlRt931g6ABH8Achzbdju90A-p4vuN3g30DPutVaLPjUK_luY5tdtuuu_8CvZ-j_w)
|
||||
|
||||
<!-- Original sequence
|
||||
sequenceDiagram;
|
||||
participant GCS
|
||||
participant Drone
|
||||
GCS->>Drone: MAV_CMD_REQUEST_PROTOCOL_VERSION
|
||||
GCS->>Drone: MAV_CMD_REQUEST_MESSAGE(param1=300)
|
||||
GCS->>GCS: Start timeout
|
||||
Drone->>GCS: PROTOCOL_VERSION in MAVLink 2 framing
|
||||
GCS->>Drone: If ACK: Switches to MAVLink 2
|
||||
|
||||
@@ -3143,9 +3143,7 @@ Large debug/prototyping array. The message uses the maximum available payload fo
|
||||
| array_id | `uint16_t` | | Unique ID used to discriminate between arrays<br>Messages with same value are from the same source (instance). |
|
||||
| <span class='ext'>data</span> <a href='#mav2_extension_field'>++</a> | `float[58]` | | data |
|
||||
|
||||
### ORBIT_EXECUTION_STATUS (360) — [WIP] {#ORBIT_EXECUTION_STATUS}
|
||||
|
||||
<span class="warning">**WORK IN PROGRESS**: Do not use in stable production environments (it may change).</span>
|
||||
### ORBIT_EXECUTION_STATUS (360) {#ORBIT_EXECUTION_STATUS}
|
||||
|
||||
Vehicle status report that is sent out while orbit execution is in progress (see [MAV_CMD_DO_ORBIT](#MAV_CMD_DO_ORBIT)).
|
||||
|
||||
@@ -6346,9 +6344,7 @@ Reposition the MAV after a follow target command has been sent
|
||||
| 6 (X Offset) | X offset from target | m |
|
||||
| 7 (Y Offset) | Y offset from target | m |
|
||||
|
||||
### MAV_CMD_DO_ORBIT (34) — [WIP] {#MAV_CMD_DO_ORBIT}
|
||||
|
||||
<span class="warning">**WORK IN PROGRESS**: Do not use in stable production environments (it may change).</span>
|
||||
### MAV_CMD_DO_ORBIT (34) {#MAV_CMD_DO_ORBIT}
|
||||
|
||||
Start orbiting on the circumference of a circle defined by the parameters. Setting values to NaN/INT32_MAX (as appropriate) results in using defaults.
|
||||
|
||||
|
||||
@@ -61,7 +61,7 @@ Composite EFI and Governor data from Loweheiser equipment. This message is crea
|
||||
| generator_temp | `float` | degC | The temperature of the mechanical motor, fuel cell core or generator. |
|
||||
| efi_batt | `float` | V | EFI Supply Voltage. |
|
||||
| efi_rpm | `float` | rpm | Motor RPM. |
|
||||
| efi_pw | `float` | ms | Injector pulse-width in miliseconds. |
|
||||
| efi_pw | `float` | ms | Injector pulse-width in milliseconds. |
|
||||
| efi_fuel_flow | `float` | | Fuel flow rate in litres/hour. |
|
||||
| efi_fuel_consumed | `float` | l | Fuel consumed. |
|
||||
| efi_baro | `float` | kPa | Atmospheric pressure. |
|
||||
|
||||
@@ -56,7 +56,7 @@ Static data to configure the ADS-B transponder (send within 10 sec of a POR and
|
||||
| gpsOffsetLat | `uint8_t` | | [UAVIONIX_ADSB_OUT_CFG_GPS_OFFSET_LAT](#UAVIONIX_ADSB_OUT_CFG_GPS_OFFSET_LAT) | GPS antenna lateral offset (table 2-36 of DO-282B) |
|
||||
| gpsOffsetLon | `uint8_t` | | [UAVIONIX_ADSB_OUT_CFG_GPS_OFFSET_LON](#UAVIONIX_ADSB_OUT_CFG_GPS_OFFSET_LON) | GPS antenna longitudinal offset from nose [if non-zero, take position (in meters) divide by 2 and add one] (table 2-37 DO-282B) |
|
||||
| stallSpeed | `uint16_t` | cm/s | | Aircraft stall speed in cm/s |
|
||||
| rfSelect | `uint8_t` | | [UAVIONIX_ADSB_OUT_RF_SELECT](#UAVIONIX_ADSB_OUT_RF_SELECT) | ADS-B transponder reciever and transmit enable flags |
|
||||
| rfSelect | `uint8_t` | | [UAVIONIX_ADSB_OUT_RF_SELECT](#UAVIONIX_ADSB_OUT_RF_SELECT) | ADS-B transponder receiver and transmit enable flags |
|
||||
|
||||
### UAVIONIX_ADSB_OUT_DYNAMIC (10002) {#UAVIONIX_ADSB_OUT_DYNAMIC}
|
||||
|
||||
|
||||
@@ -44,7 +44,7 @@ Support for _MAVLink 2_ is indicated in the [AUTOPILOT_VERSION](../messages/comm
|
||||
但是, 大多数通信链路并不完全透明, 因为它们要么包括路由, 要么在数据化上固定长度的无线实现的情况下。
|
||||
In order to also test the link, the _MAVLink 2_ handshake protocol sends a _MAVLink 2_ frame to test the complete communication chain.
|
||||
|
||||
To do so, the GCS sends a [COMMAND_LONG](../messages/common.md#COMMAND_LONG) or [COMMAND_INT](../messages/common.md#COMMAND_INT) message with the command ID [MAV_CMD_REQUEST_PROTOCOL_VERSION](../messages/common.md#MAV_CMD_REQUEST_PROTOCOL_VERSION).
|
||||
To do so, the GCS sends a [COMMAND_LONG](../messages/common.md#COMMAND_LONG) or [COMMAND_INT](../messages/common.md#COMMAND_INT) message with the command ID [MAV_CMD_REQUEST_MESSAGE](../messages/common.md#MAV_CMD_REQUEST_MESSAGE) and param1=300 (PROTOCOL_VERSION)
|
||||
|
||||
If the system supports _MAVLink 2_ and the handshake it will respond with [PROTOCOL_VERSION](../messages/common.md#PROTOCOL_VERSION) **encoded as MAVLink 2 packet**.
|
||||
If it does not support _MAVLink 2_ it should `NACK` the command.
|
||||
@@ -52,13 +52,13 @@ If it does not support _MAVLink 2_ it should `NACK` the command.
|
||||
|
||||
下表显示完整顺序。
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoic2VxdWVuY2VEaWFncmFtO1xuICAgIHBhcnRpY2lwYW50IEdDU1xuICAgIHBhcnRpY2lwYW50IERyb25lXG4gICAgR0NTLT4-RHJvbmU6IE1BVl9DTURfUkVRVUVTVF9QUk9UT0NPTF9WRVJTSU9OXG4gICAgR0NTLT4-R0NTOiBTdGFydCB0aW1lb3V0XG4gICAgRHJvbmUtPj5HQ1M6IFBST1RPQ09MX1ZFUlNJT04gaW4gTUFWTGluayAyIGZyYW1pbmdcbiAgICBHQ1MtPj5Ecm9uZTogSWYgQUNLOiBTd2l0Y2hlcyB0byBNQVZMaW5rIDJcbiAgICBEcm9uZS0-PkdDUzogU3dpdGNoZXMgdG8gTUFWTGluayAyIG9uIHJlY2VpdmUiLCJtZXJtYWlkIjp7InRoZW1lIjoiZGVmYXVsdCJ9LCJ1cGRhdGVFZGl0b3IiOmZhbHNlfQ)
|
||||
[](https://mermaid.live/edit#pako:eNptkG1rwjAQx79KuFcbOEkftJoxQWoRma6bdb4YBQntVcNs4mK6J_G7L1bcxmZeHLn_3f93x-0gUzkCgy2-VCgzHAi-1Ly8TiWxb8O1EZnYcGnIMEz-iwOtJB5lW7_q9WqBkUl_vggng8U0eniMktliEiVJfxhdWC8vnRuP0svfLhsZSYwFEyNKVJU5VmvaqX4_jWdxGI8X82iajOI7IuRhzljIZ-KSwoKFXJ7ZZVSQfnhr-W_CZCvcEqN-fGfmnO0jShKNGYpXhAYstciBGV1hA0rUJT-ksDvAUjArLDEFZr85FrxamxRSubc2e7InpcqTU6tquQJW8PXWZtUm5-Z0_z9qlAuj9LeoUeaoQ1VJAyzwazCwHbwDa9NW02tT2mlRt931g6ABH8Achzbdju90A-p4vuN3g30DPutVaLPjUK_luY5tdtuuu_8CvZ-j_w)
|
||||
|
||||
<!-- Original sequence
|
||||
sequenceDiagram;
|
||||
participant GCS
|
||||
participant Drone
|
||||
GCS->>Drone: MAV_CMD_REQUEST_PROTOCOL_VERSION
|
||||
GCS->>Drone: MAV_CMD_REQUEST_MESSAGE(param1=300)
|
||||
GCS->>GCS: Start timeout
|
||||
Drone->>GCS: PROTOCOL_VERSION in MAVLink 2 framing
|
||||
GCS->>Drone: If ACK: Switches to MAVLink 2
|
||||
|
||||
@@ -3143,9 +3143,7 @@ Large debug/prototyping array. The message uses the maximum available payload fo
|
||||
| array_id | `uint16_t` | | Unique ID used to discriminate between arrays<br>Messages with same value are from the same source (instance). |
|
||||
| <span class='ext'>data</span> <a href='#mav2_extension_field'>++</a> | `float[58]` | | data |
|
||||
|
||||
### ORBIT_EXECUTION_STATUS (360) — [WIP] {#ORBIT_EXECUTION_STATUS}
|
||||
|
||||
<span class="warning">**WORK IN PROGRESS**: Do not use in stable production environments (it may change).</span>
|
||||
### ORBIT_EXECUTION_STATUS (360) {#ORBIT_EXECUTION_STATUS}
|
||||
|
||||
Vehicle status report that is sent out while orbit execution is in progress (see [MAV_CMD_DO_ORBIT](#MAV_CMD_DO_ORBIT)).
|
||||
|
||||
@@ -6346,9 +6344,7 @@ Reposition the MAV after a follow target command has been sent
|
||||
| 6 (X Offset) | X offset from target | m |
|
||||
| 7 (Y Offset) | Y offset from target | m |
|
||||
|
||||
### MAV_CMD_DO_ORBIT (34) — [WIP] {#MAV_CMD_DO_ORBIT}
|
||||
|
||||
<span class="warning">**WORK IN PROGRESS**: Do not use in stable production environments (it may change).</span>
|
||||
### MAV_CMD_DO_ORBIT (34) {#MAV_CMD_DO_ORBIT}
|
||||
|
||||
Start orbiting on the circumference of a circle defined by the parameters. Setting values to NaN/INT32_MAX (as appropriate) results in using defaults.
|
||||
|
||||
|
||||
@@ -61,7 +61,7 @@ Composite EFI and Governor data from Loweheiser equipment. This message is crea
|
||||
| generator_temp | `float` | degC | The temperature of the mechanical motor, fuel cell core or generator. |
|
||||
| efi_batt | `float` | V | EFI Supply Voltage. |
|
||||
| efi_rpm | `float` | rpm | Motor RPM. |
|
||||
| efi_pw | `float` | ms | Injector pulse-width in miliseconds. |
|
||||
| efi_pw | `float` | ms | Injector pulse-width in milliseconds. |
|
||||
| efi_fuel_flow | `float` | | Fuel flow rate in litres/hour. |
|
||||
| efi_fuel_consumed | `float` | l | Fuel consumed. |
|
||||
| efi_baro | `float` | kPa | Atmospheric pressure. |
|
||||
|
||||
@@ -56,7 +56,7 @@ Static data to configure the ADS-B transponder (send within 10 sec of a POR and
|
||||
| gpsOffsetLat | `uint8_t` | | [UAVIONIX_ADSB_OUT_CFG_GPS_OFFSET_LAT](#UAVIONIX_ADSB_OUT_CFG_GPS_OFFSET_LAT) | GPS天线纬度偏移(DO-282B的表2-36) |
|
||||
| gpsOffsetLon | `uint8_t` | | [UAVIONIX_ADSB_OUT_CFG_GPS_OFFSET_LON](#UAVIONIX_ADSB_OUT_CFG_GPS_OFFSET_LON) | GPS天线从机头经度偏移[如果非零,取得位置(以米为单位)除以2并加一](DO-282B的表2-37) |
|
||||
| stallSpeed | `uint16_t` | 厘米/秒 | | 飞机失速速度(厘米/秒) |
|
||||
| rfSelect | `uint8_t` | | [UAVIONIX_ADSB_OUT_RF_SELECT](#UAVIONIX_ADSB_OUT_RF_SELECT) | ADS-B transponder reciever and transmit enable flags |
|
||||
| rfSelect | `uint8_t` | | [UAVIONIX_ADSB_OUT_RF_SELECT](#UAVIONIX_ADSB_OUT_RF_SELECT) | ADS-B transponder receiver and transmit enable flags |
|
||||
|
||||
### UAVIONIX_ADSB_OUT_DYNAMIC (10002) {#UAVIONIX_ADSB_OUT_DYNAMIC}
|
||||
|
||||
|
||||
Reference in New Issue
Block a user